Odometry Robot
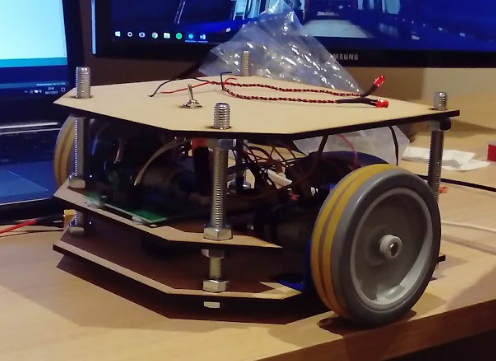
This project was in semester 1, year 2. Here I led a team of 5 in designing, building, programming, and testing a robot to drive around a preplanned course, dropping M&Ms in specific locations. I was the team leader, as well as the programmer. While I oversaw the design process, most of it was done by my team members.

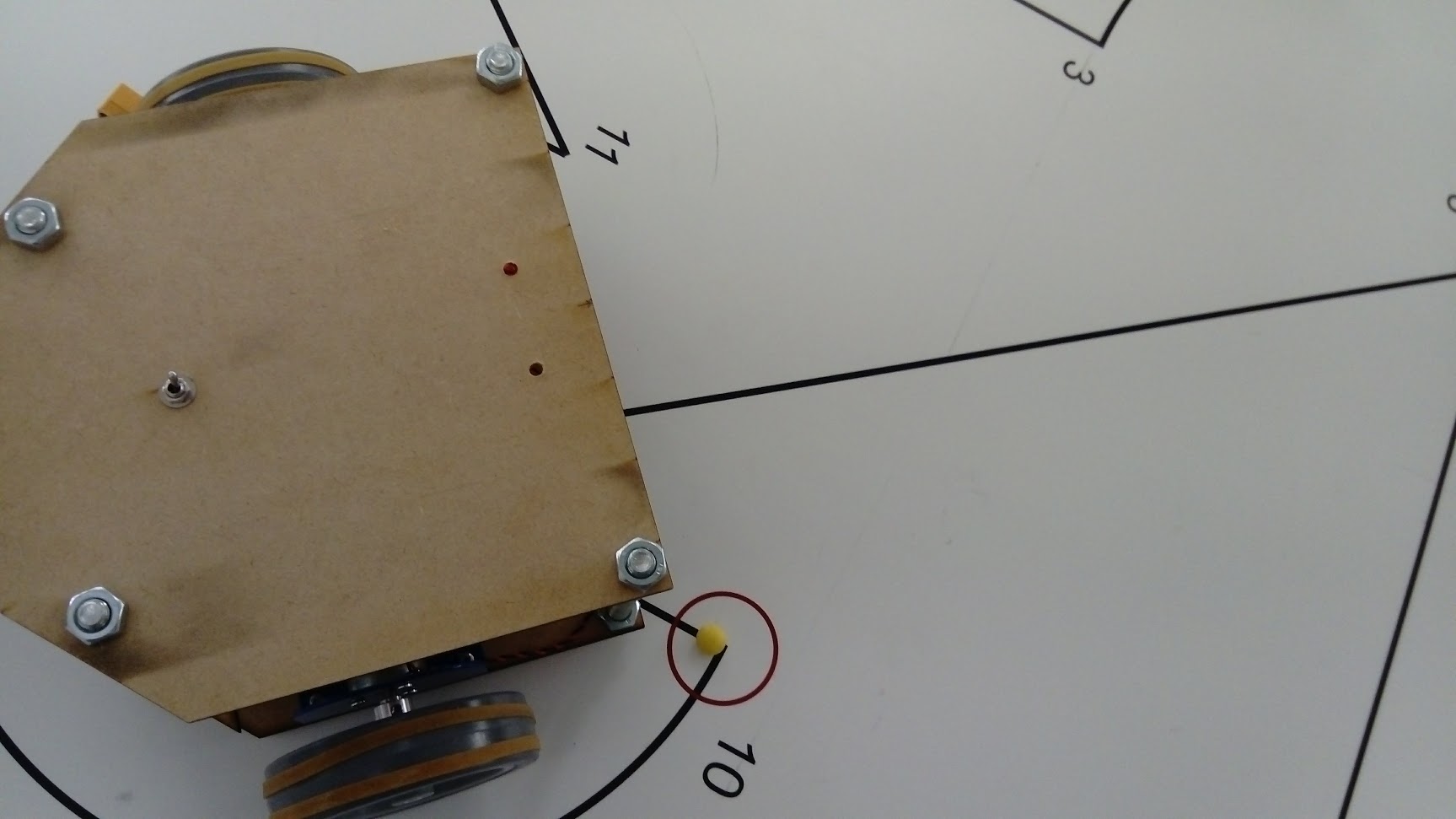
On the assessment day, the robot followed the course perfectly, however the M&M dispenser was incorrectly loaded, and we unfortunately didn't get many good drops. Overall though, I would still deem the project a success.