Spider Robot
For no real reason other than to see if I could, I wanted to build a robot spider. This project took a small amount of my time for a few months. 3 main iterations were designed and built. All three were quadropedal designs. The first used 8 servos, 2 for each leg.
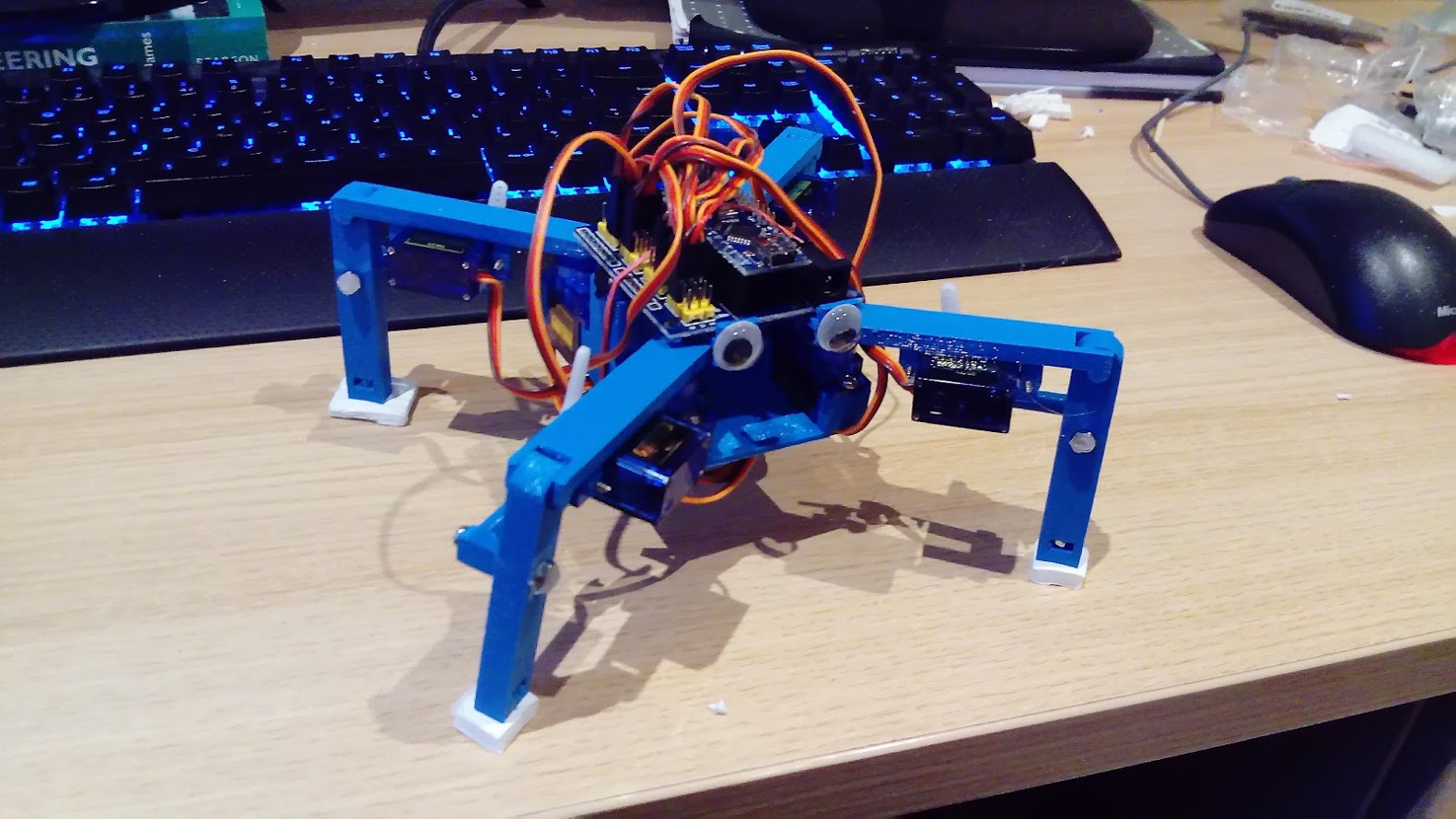
The brain is an arduino nano with a shield which allows for easy wiring of the servos. Power is provided by a small 3s LiPo battery (from my RC planes). Unfortunately this first design suffered from lots of backlash in the legs. This caused it to be very flimsy and I was unable to make it walk. Could get it to do this though:
This led to version 2, which used Klann linkages and 2 continuous rotation servos.
The main issue with this design was motors running out of sync, causing it to flop to one side after a while. It also suffered backlash problems, due to the large amount of linkages and pivots.
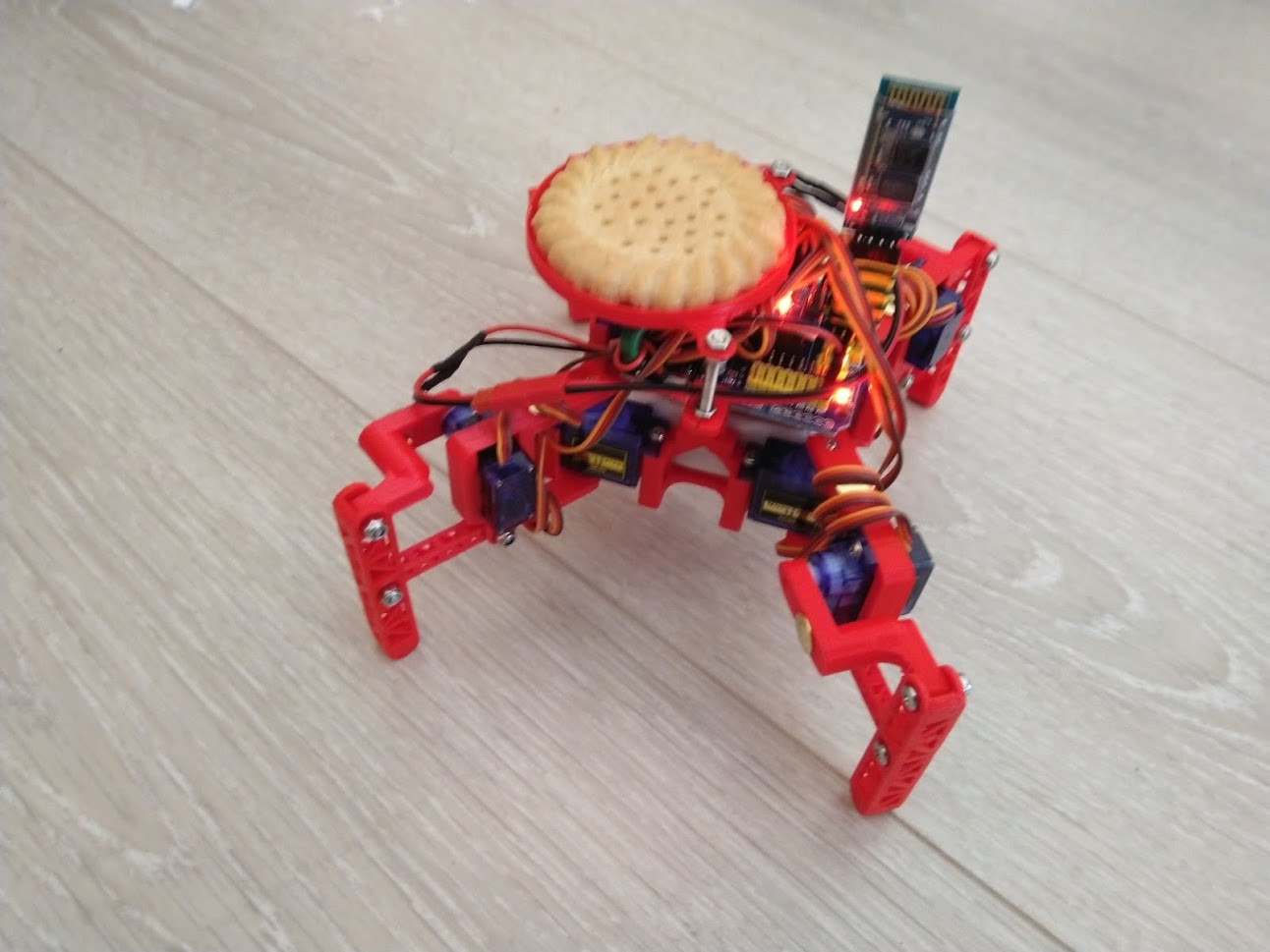
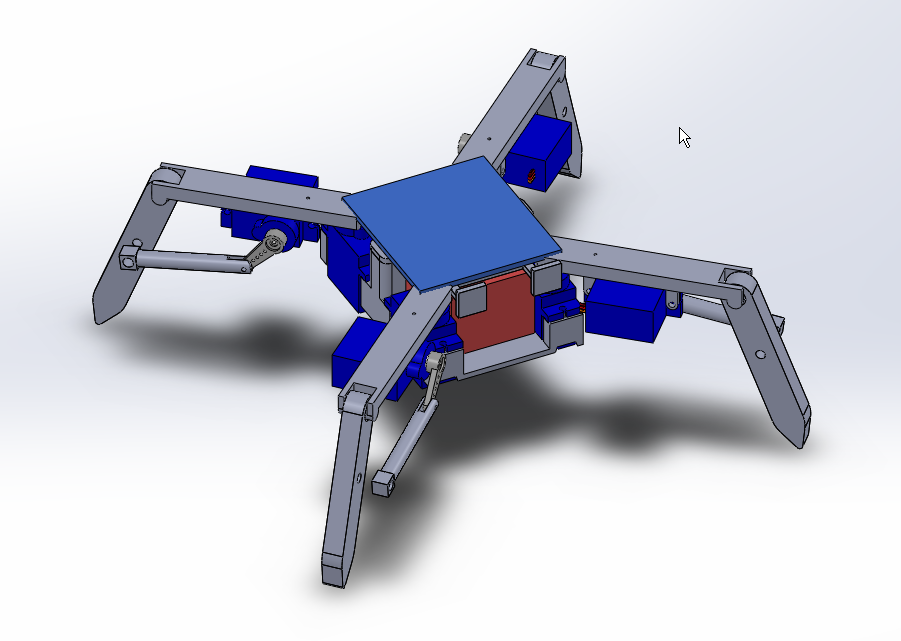
The third and final (for now at least) version went back to the original design, using 8 servos to control the joints. The design was built from the ground up to be more rigid.
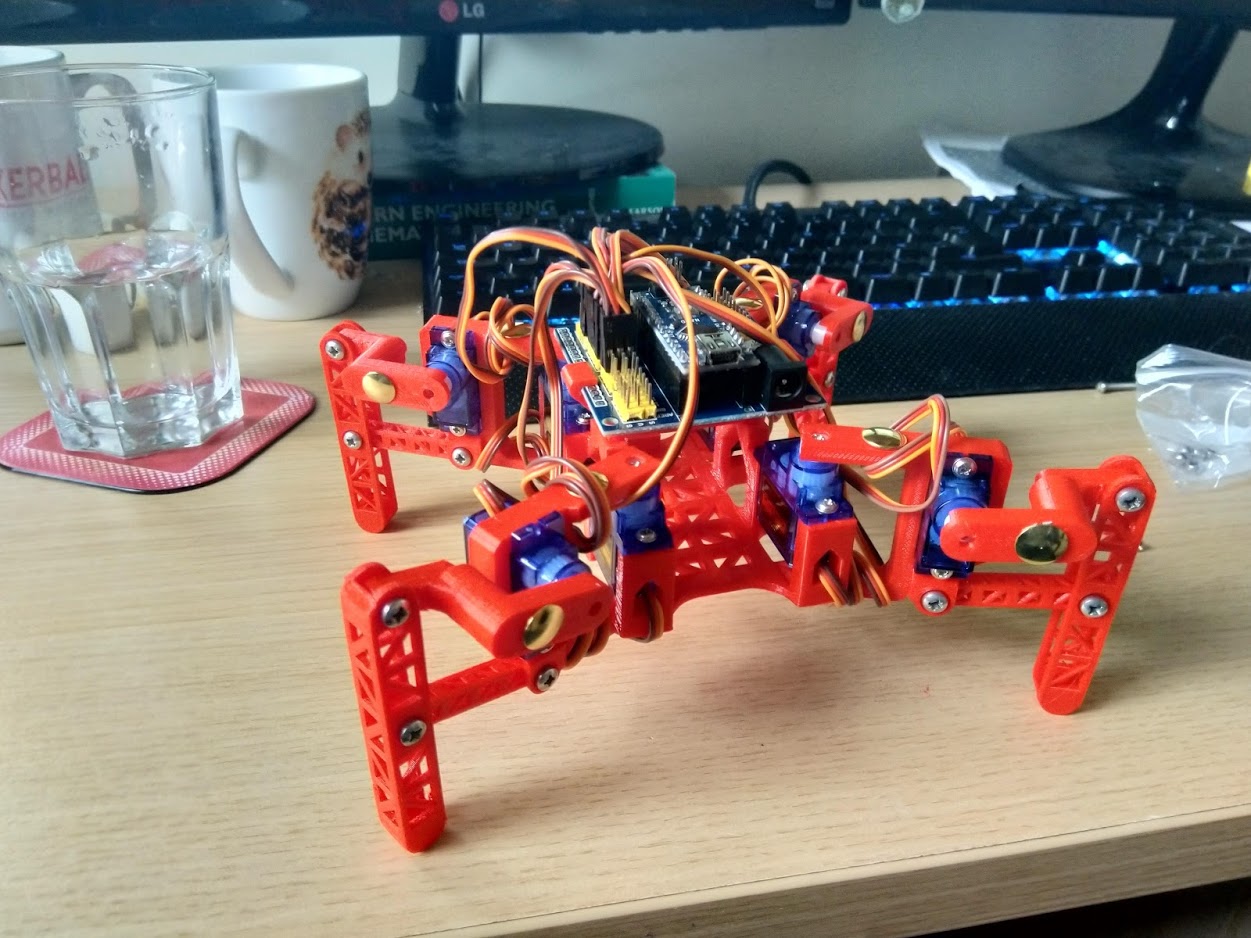
I have since added a HC-06 bluetooth module, which allows the robot to be controlled through an app on my phone. More importantly, I have created created an excellent new innovation for the biscuit industry.