Tricopter
The goal of this project was to be a pathfinder for future VTOL aircraft. I'd never built a multirotor before this, and it felt like a good starting point. I started by deciding the rough size and layout. I went with a T shape frame, as it seemed easier to put together. As I was expecting to crash it a lot, it needed to be cheap, so I picked 15x15mm wood, held together with 3D prints (just PLA) and nuts and bolts. I don't remember what kind of wood it is but it probably isn't important. I then planned the desing in more detail using Solidworks, however my license has since expired so I'm not able to get any screenshots.

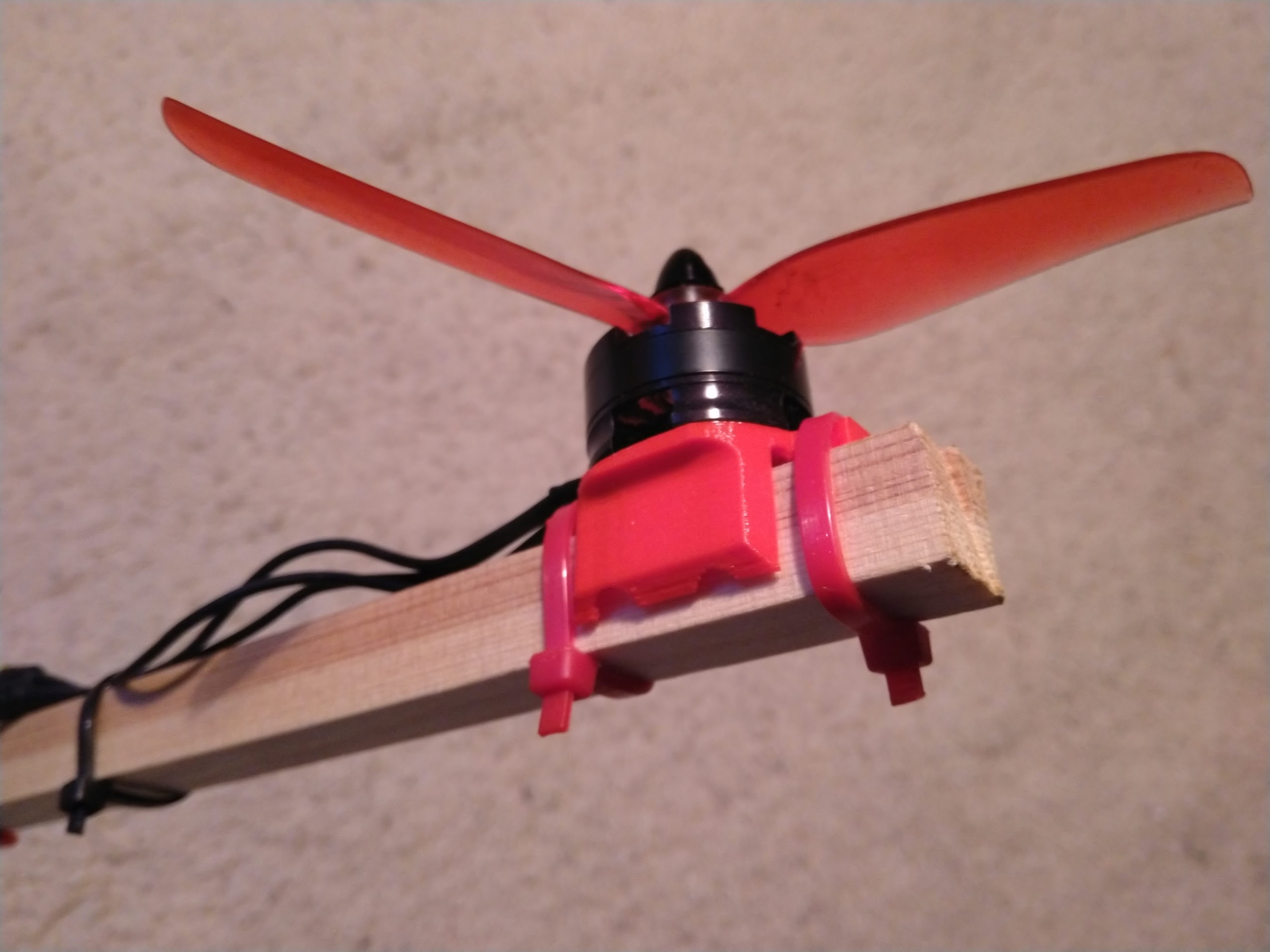
For power, I decided to use 3 2204 2300Kv motors, 5140 3 bladed props, 1000mAh 3s LiPo battery, and 3x30A ESCs. In hindsight, I should have picked lower Kv motors and bigger props for the size of the frame, and possibly used a 4s battery. The front motors are mounted to the frame using 3D printed mounts, which are then ziptied to the frame.
I decided to tilt the rear motor using a servo directly driving it, as I figured this would be the best way to reduce backlash. I initially used a MG90 servo for the tail, however this was not powerful enough and I later swapped it out for a Corona DS339HV digital servo. The servo mount and tilt mechanism are also ziptied to the frame.


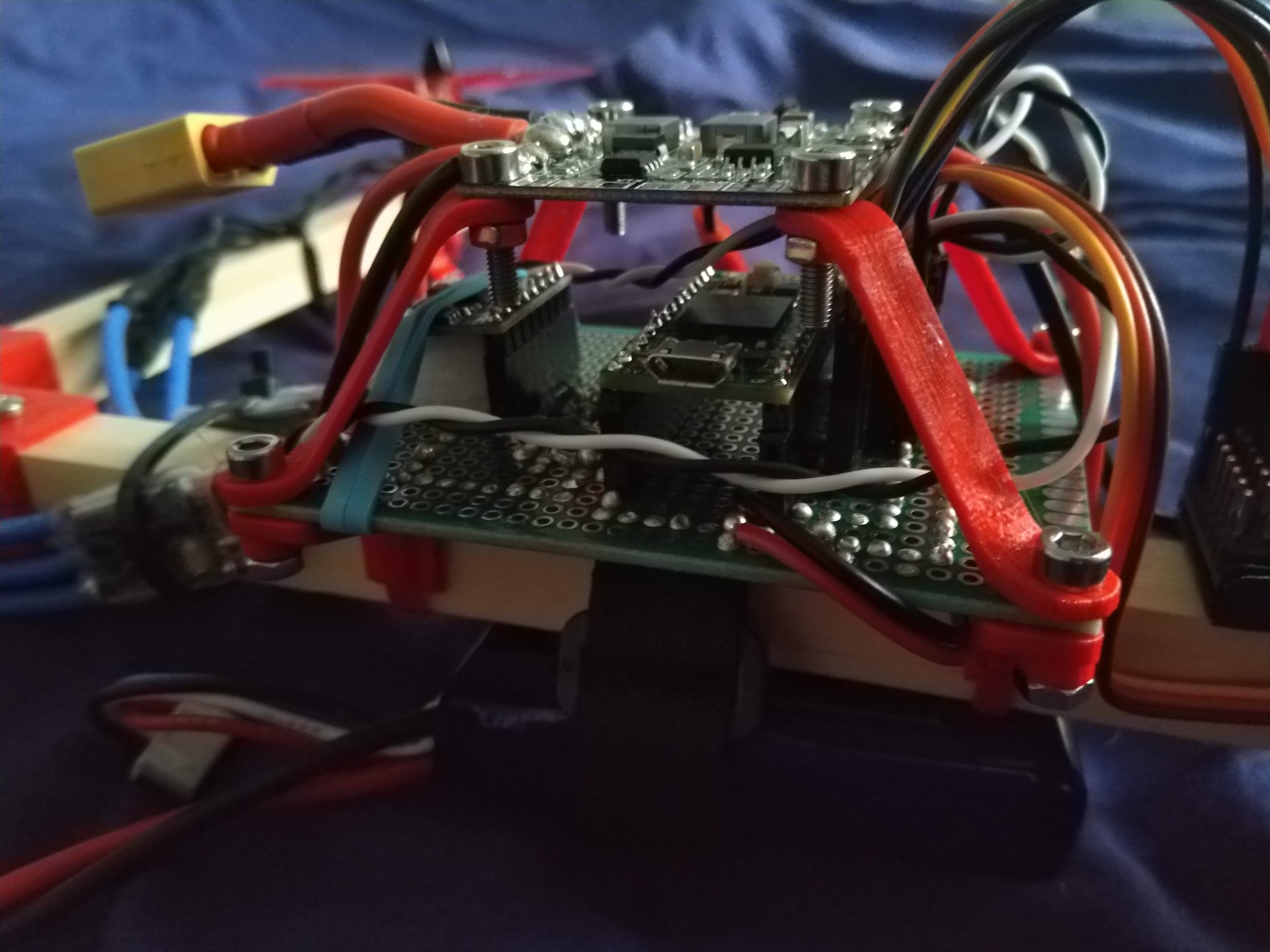
For the flight controller, I decided to make my own, for the fun of it, the challenge, and also the future flexibility. The actual control is done by a Teensy 4.0, which is more than powerful enough for this task, and naturally is quite small. For the IMU, I picked an MPU6050 because they're cheap. As it's all just a prototype, I used some prototyping board to mount and connect the Teensy, IMU, radio inputs and motor/servo outputs.
While waiting for parts to arrive, I wrote the flight controller software. This is done in C++, making use of the Arduino IDE with the TeesnyDuino modification. Ater writing the first version of the software, I accidentally found the dRehmFlightVTOL project, which also uses a Teensy 4.0 as a flight controller. While I could of used the dRehmFlight code, I'm glad I didn't, as frankly I enjoyed writing my own. After testing as much as I could at home, I took it to a small bit of grass outside the office to test it and tune it.

After the flights in the video, I upgraded the tail servo and retuned the PIDs to improve flight characterstics. todo get footage.